







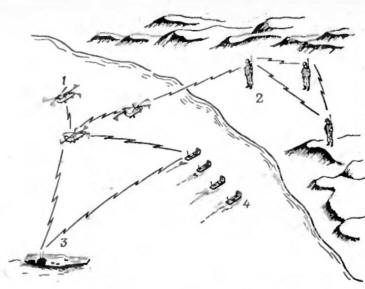
Средства навигации и топопривязкиПолковник-инженер Ф. Борисов Готовясь к развязыванию агрессивных войн в различных районах земного шара, командования вооруженных сил США и других империалистических стран значительное внимание уделяют разработке современных средств навигации и топопривязки, обеспечивающих ведение боевых действии сухопутных поиск в различных географических и метеорологических условиях. Одновременно с созданием навигационных приборов для танков и командирских машин американская промышленность начинает производить точную электронную аппаратуру, предназначенную для топопривязки огневых позиции артиллерии, целеуказания и обеспечения высадки морских и воздушных десантов в заранее выбранных пунктах. Для личного состава сухопутных войск разрабатываются индивидуальные средства опре деления своего местоположения на местности, не имеющей ориентиров. Особенностями современных средств навигации и топопривязки являются портативность, автономность работы, простота применения, возможность быстрого развертывания и способность действовать в любое время суток и в различных метеорологических условиях. Система ПАДС (PADS - Position and Azimuth Detrminnie System) служит для непрерывного определения местоположения машин американских сухопутных войск и топопривязки позиции ракетных комплексов. Она представляет собой инерциальную платформу, являющуюся датчиком пройденного машиной расстояния и азимута движения. Выходные данные поступают в небольшой цифровой вычислитель и далее на планшет. Перед началом движения в вычислитель вводятся координаты исходного пункта. Пишущее перо устанавливается в точку топографической карты планшета, соответствующую координатам исходного пункта. В процессе движения в вычислитель непрерывно поступают электрические сигналы пройденного пути от датчика расстояния и азимуты движения. На основе этих данных вычислитель непрерывно рассчитывает координаты машин. Сигналы вычислителя поступают на электромоторчики планшета, которые перемещают перо по топографической карте. Система ПЛРС (PLRS - Position location Reporting System) разработана в США для обеспечения боевых действий морской пехоты. Как сообщается в американской печати, ее можно использовать в батальонном звене при высадке десантов на побережье. Она позволяет командиру определять (по экрану индикатора) местонахождение подчиненных подразделении (взводов), а командиру каждого взвода знать свое местоположение. Аппаратуру системы можно устанавливать на транспортные вертолеты, поддерживающие действия батальона. С ее помощью пилот определяет направление движения и дальность до места высадки десанта. По мнению американских специалистов, систему можно также применять для определении взаимного расположения разведывательных подразделений (патрулей). В этом случае каждому подразделению указываются азимут и дальность до другого подразделения. При выходе подразделений на заминированные участки местности, известные командованию, система предупреждает командира и патрульных об опасности. В состав системы ПЛРС входят центральный пункт, переносные приборы для личного состава пехотных взводов или патрулей, а также аппаратура для вертолетов (рис. 1). На центральном пункте будут находиться приемо-передающая аппаратура, ЭВМ, индикатор и управляющие устройства. Все оборудование центрального пункта должно монтироваться в кузове автомобиля или на вертолете. Вес аппаратуры вместе с кузовом около 500 кг. Во взводах или патрулями предполагается использовать приемопередатчик с цифровым индикатором и батареей питания (общий вес 4-5 кг). Их будут носить в упаковке вместе с носимой радиостанцией. На вертолетах установит такую же аппаратуру. Как указывают иностранные специалисты, зона действия системы ПЛРС составляет несколько сотен квадратных километров. Испытания системы ПЛРС предполагалось начать в конце 1974 года. В американской печати сообщалось, что, кроме корпуса морской пехоты, эту систему планируют использовать и сухопутные войска США.
Система ЛРПДС (LRPDS - Long Range Position Determining System) разработана американской фирмой "Моторола" в 1973-1974 годах. Она предназначена для топографической привязки огневых позиций артиллерии. В состав системы входят наземный вычислительный центр, радиолокационные ответчики, устанавливаемые в пунктах, требующих привязки, самолет с приемопередающей, запоминающей я распределяющей аппаратурой. Топографическая привязка производится следующим образом. Для самолета выбирается строго определенный маршрут, чтобы его координаты в каждый момент времени были известны с большой точностью. Радиолокационный запросчик самолета в определенные моменты времени излучает кодированные УКВ сигналы, причем в код сигналов входят номера пунктов привязки. Эти сигналы принимаются ответчиками, расположенными в пунктах привязки, и переизлучаются обратно на борт самолета. Специальная аппаратура принимает сигналы от каждого пункта привязки и фиксирует задержки по времени. После этого последовательно полученные данные передаются в наземный вычислительный центр, где по величине задержки сигналов наземных ответчиков относительно самолетного запросчика определяется расстояние R в момент запроса (рис. 2). Через некоторое время циклы запроса повторяются, в результате чего определяются расстояния, равные абсолютным значениям R0 - C1T1, R0- С2T2, и т. д. При точно известных положениях самолета в каждый момент запроса определяются координаты пункта привязки. В американской печати сообщается, что с помощью аппаратуры системы ЛРПДС за два часа можно привязать к местности до 30 огневых позиции, расположенных на площади 60x60 км. Ошибка определения координат не превышает 10 м. Иностранные специалисты указывают, что при использовании системы ЛРПДС для топографической привязки не требуются какие-либо геодезические опорные точки, а работа аппаратуры системы короткими импульсами повышает помехозащищенность. Аппаратура "Теллурометр" (Тellurometer), разработанная английской фирмой "Плессн", имеет такое же назначение, что и американская система ЛРПДС, однако в отличие от последней не является автономной Она используется для определения координат методом измерения дальности до точек, положение которых известно. Теллурометры находятся на вооружении армии некоторых стран Европы, Ближнего Востока и Африки. Аппаратура состоит из двух приемопередатчиков, один из которых устанавливается в пункте с известными координатами, а другой - в пункте, положение которого нужно определить. В настоящее время известны три варианта аппаратуры - MRA3, MRА5 и MRB 201. Аппаратура MRA3 используется в системе управления огнем полевой артиллерии "Фейс", в системе звукометрической разведки, метеорологической системе "Аметс" и в РЛС засечки огневых позиции стреляющих минометов. Дальность действия аппаратуры 50 км, точность определения координат 0,015±3,10-6 м; рабочая частота находится в 3-см диапазоне воли. В конструкции аппаратуры электровакуумным прибором является только клистрон в передатчике. Аппаратура MRA5 представляет собой модернизированный вариант аппаратуры MRA3. В настоящее время она состоит на вооружении английских сухопутных войск. Ее планируется принять также на вооружение других европейских стран агрессивного блока НАТО. Антенну аппаратуры MRА5 можно устанавливать непосредственно на приемопередающем блоке {аналогично тому, как это делается в аппаратуре MRA3), на мачте или треноге. Максимальная длина кабеля между аппаратурой и антенной 25 м. Установка антенны на мачте позволяет применять аппаратуру в лесу и на пересеченной местности.
Дальность действия аппаратуры MRA5 свыше 50 км. точность определения координат
0,01±5.10-6м. Потребляемая мощность 12 Вт. Максимальное напряжение
источника питания (аккумуляторных батарей) 34 В, минимальное - 10,8 В. Несущую
частоту аппаратуры можно перестраивать в процессе работы. Командование вооруженных сил США в течение многих лет разрабатывает новую спутниковую радионавигационную систему "НАВСТАР" (NAVSTAR), или ГПС (CPS - Global Positioning System). Утверждается, что она будет использоваться всеми видами вооруженных сил, в том числе и сухопутными войсками. Эксплуатация системы должна начаться в середине 80-х годов. Предполагается вывести на круговые орбиты высотой 20 000 км 24 искусственных спутника Земли. Командование американских сухопутных войск считает, что с помощью новой системы можно повысить эффективность применения средств разведки, картографирования, топографической привязки огневых позиций, а также повысить точность навигации боевых машин и подразделений в различных районах земного шара в любой момент времени, Для этой системы в США разрабатываются портативные приемо-индикаторные устройства. Длительное время в ВМС и ВВС США используется система дальней радионавигации "Лоран" С. По мнению американских специалистов, в сухопутных войсках США ее не применяют потому, что она имеет сложное, громоздкое и дорогостоящее приемное оборудование. Как сообщалось в иностранной печати, этих недостатков не имеет созданная в 1972 году система "Лоретс". Ее аппаратура транспортируется подвижными средствами (самолетами, кораблями, боевыми машинами) или переносится личным составом подразделений. В последнем случае она выполняется в виде небольшого приемного блока, размещаемого в одной упаковке с носимой УКВ станцией. Аппаратура системы "Лоретс" принимает от наземных станций системы "Лоран" С информацию о расстояниях от точки приема до наземных станций. Затем эти сигналы детектируются и используются для модуляции сигналов передатчика УКВ диапазона (им может быть носимая радиостанция). Сигналы передатчика принимаются на центральной станции (командном пункте), где. с помощью ЭВМ определяются координаты точки приема (солдат, несущий аппаратуру "Лоретс"). На центральной станции собираются данные о местоположении каждою приемника "Лоретс". Для ориентирования при ведении боевых действий в малоосвоенных районах земного шара, на труднодоступной лесистой и пустынной местности в США разработан индивидуальный навигационный прибор AN/PSN-7. По сообщениям американской печати, этот прибор позволяет пешим солдатам измерить пройденный путь и определять направление движения. Вес прибора 10 кг. Для обучения работе с прибором требуется 3-4 ч (в зависимости от уровня топографической подголовки личного состава). Перед использованием прибор калибруется, вводятся координаты исходного пункта движения и магнитное склонение. В состав прибора входят датчики пройденного расстояния, магнитный компас, счетно-решающее устройство (СРУ), восьмицифровой индикатор и батарейный источник питания. Датчики пройденного расстояния измеряют число и длину шагов. Они представляют собой индукционные катушки с логическими элементами. Данные о пройденном расстоянии и направлении движения поступают в СРУ, которое непрерывно ведет расчет текущих координат местоположения. Координаты отображаются на индикаторе. Датчики крепятся на левом и правом ботинках солдата, а СРУ. компас и две батареи питании размещаются за спиной аналогично переносным радиостанциям AN/PRC-25 и AN/PRC-27. Индикатор носится на руке или на поясе. Прибор AN/PSN-7 испытывался в подразделениях американских сухопутных войск во время агрессивной войны в Южном Вьетнаме. После совершения марша протяженностью 10 км он обеспечивал выход в заданный пункт С точностью до 200 м. Один из образцов прибора испытывался под водой в течение 9 ч. Приборы определяли местоположение патруля с точностью 2-3 проц. пройденного пути. Зарубежное военное обозрение 1975 №8 С. 39-42 Смотрите также | |||||
|
| |||||
| Просмотров: 5959 | | | |||||

| Всего комментариев: 0 | |