







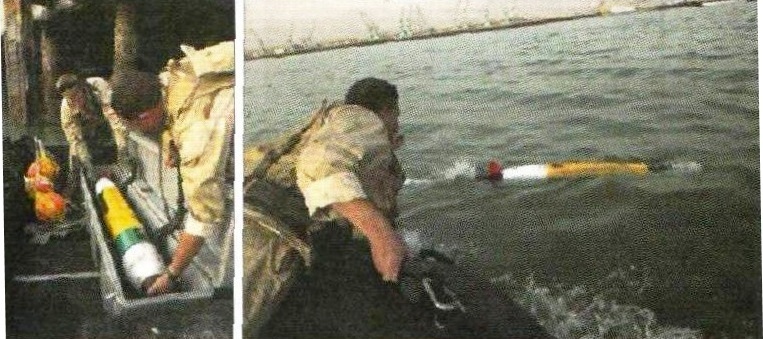
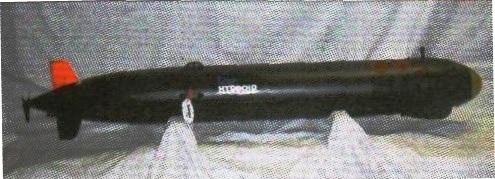
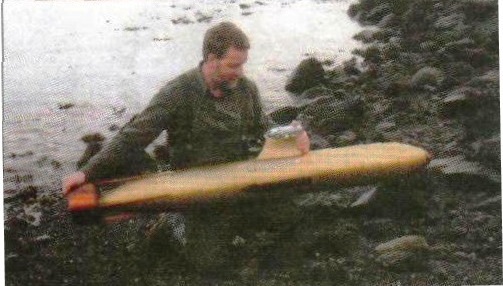
Современные и перспективные необитаемые подводные аппараты ВМС СШАКапитан 1 ранга И. Белоусов В ВМС ведущих иностранных государств одним из приоритетных направлений развития боевых средств флота считается в настоящее время создание и применение с надводных кораблей и подводных лодок автономных необитаемых (АНПА) и дистанционно управляемых подводных аппаратов (ДУПА). С учетом достигнутого уровня технологий на современном этапе АНПА и ДУПА способны эффективно решать в интересах флота целый ряд важных задач, не подвергая риску личный состав ВМС. В число этих задач входит: поиск, обнаружение, идентификация и уничтожение большинства типов контактных и неконтактных морских мин, включая донные; ведение гидроакустической разведки; сбор гидрографической и батиметрической информации; вскрытие и обследование системы противодесантной и противодиверсионной обороны противника в районах планируемых операций; разведка подводных гидротехнических сооружений и инфраструктуры пунктов базирования; обследование корпусов кораблей (судов) и ряд других. Сформировавшаяся на сегодняшний день у командования ВМС система взглядов на предназначение и место АНПА в структуре разведывательно-информационной системы освещения подводной обстановки позволила сформулировать общие требования к ним и, следовательно, унифицировать реализацию конструктивных решений и состав бортовой аппаратуры различных образцов. Современные АНПА оснащены комплексом систем и устройств, обеспечивающих их самостоятельное движение под водой. Большинство из них имеют корпус в форме торпеды с электроэнергетической установкой, состоящей из литиево-ионной аккумуляторной батареи (АБ) и гребного электродвигателя. Управление осуществляется автономно по программе, заложенной в память бортовой ЭВМ, с использованием инициальной навигационной системы (ИНС) и доплеровского лага с периодическим уточнением (при подвсплытии) местоположения по данным космической радионавигационной системы (КРНС) "Навстар". Бортовая поисковая аппаратура может включать: гидролокационную станцию (ГЛС) переднего обзора; гидролокатор бокового обзора (ГБО), обеспечивающий одновременное обнаружение подводных объектов в широкой полосе за счет использования установленных побортно акустических антенн, характеристики направленности которых ориентированы перпендикулярно диаметральной плоскости аппарата; цифровую видеокамеру; датчики для измерения параметров морской воды и др. Полученные данные записываются на жесткий магнитный накопитель для последующего легального анализа результатов проведенной операции после подъема АНПА на борт носителя. Для обеспечения двусторонней связи между пунктом управления (оператором) и АНПА в позиционном положении используется абонентская аппаратура коммерческой системы персональной подвижной спутниковой связи "Иридиум" (рабочие частоты I 616-1 626,5 МГц). В состав бортового оборудования входит также аппаратура звукоподводной связи. Применение аппаратов с надводных кораблей обеспечивается специальными модулями в габаритах морских транспортных контейнеров. Кроме собственно аппаратов, элементов спускоподъемных устройств, вспомогательного оборудования и сменного комплекта АБ в модуле располагается автоматизированное рабочее место (АРМ) оператора. Наиболее полно номенклатура подводных аппаратов различного типа и назначения представлена в ВМС США. В генеральном плане разработки АНПА (от 2004 года) принята следующая условная их классификация: легкие/переносные (масса до 45 кг, диаметр корпуса 76,2-230 мм, автономность 10-20 ч); малогабаритные (230 кг, 324 мм, 20-40 ч); средние (до 1 400 кг, 533 мм, 40-80 ч); крупногабаритные (до 10 т, 910-1 820 мм, до 400 ч). Повышенный интерес флотских специалистов к легким/переносным подводным аппаратам, получившим наиболее широкое распространение, обусловлен их сравнительно невысокой закупочной стоимостью (несколько десятков тысяч долларов) и умеренными эксплуатационными расходами. Небольшие массогабаритные характеристики таких аппаратов дают возможность применять их как автономно, так и в составе комплексной системы минной разведки с необорудованных специальными спускопадъемными устройствами носителей разных классов и типов (с кораблей и вспомогательных судов, катеров, надувных лодок с жестким корпусом, а также с вертолетов). Модульная конструкция позволяет в короткие сроки производить ручную сборку аппаратов расчетом из двух человек без использования специального стенда и вносить необходимые изменения в состав полезной нагрузки. Кроме того, они в наибольшей степени соответствуют потребностям сил специальных операций (ССО) - могут скрытно доставляться к побережью. С 2002 года на вооружении специальных отрядов разминирования американских ВМС состоит система минной разведки Мк 18 Mod.0 "Скалпин". Основным ее элементом являются три переносных АНПА, разработанных на базе исследовательского аппарата "Ремус-100" (REMUS - Remote Environmental Monitoring Units) фирмы "Гидроид" (с 2008 года совместная компания "Гидроид-Конгсберг"). Тактико-технические характеристики этих АНПА следующие: масса с полезной нагрузкой 37-50 кг, длина 1,6 м, диаметр 190 мм, глубина применения 3-100 м, скорость хода 0,5-5,4 уз, радиус действия 60 миль, продолжительность работы 22 ч (при поисковой скорости 3 уз). В базовой комплектации аппарат оснащается разработанным фирмой "Марине соникс" ГБО (рабочие частоты 900/1 800 кГц) с синтезированной апертурой антенны, обладающим повышенной разрешающей способностью (5х5 см на дистанции 50 м), доплеровским лагом (рабочая частота 1 200 кГц), приемником КРНС "Навстар", а также датчиками температуры и удельной электрической проводимости морской воды.
Автоматизированное рабочее место оператора (комплектуется персональным переносным компьютером) позволяет кроме планирования операции, ввода данных и др. отображать на дисплее с цветовым кодированием информации форму и размеры гидролокационного изображения объекта, контур его акустической тени передавать эффекты акустического контраста объекта по отношению к окружающему фону. Это существенно упрощает классификацию и ускоряет процесс обработки информации в целом. Данная система применялась в марте 2003 года личным составом 1-го специального отряда разминирования (NSCT-1) ВМС США в ходе операции по расчистке подходных фарватеров и гавани иракского порта Умм-Каср. Боевое применение АНПА было организовано совместно со штатной группой морских животных ВМС США, в состав которой входили две пары дельфинов, обученных поиску на глубинах до 100 м донных и полностью заглубленных в грунт (до 0,5 м) мин. Дельфины использовались для подтверждения результатов обследования морского дна, полученных от аппаратов. В общей сложности в течение месяца удалось обнаружить 237 подводных объектов, 100 из которых были классифицированы как морские мины. По результатам эксплуатации, в том числе в боевых условиях, специалисты ВМС приняли решение о модернизации системы "Скалнин". Новая ее модификации - Мк 18 Mod. 1 "Свордфиш" (масса 43 кг) - предназначена для сбора гидрологической и батиметрической информации, а также для вскрытия системы инженерных заграждений противодесантной обороны противника в прибрежной полосе на глубинах от 3 до 12 м. С 2008 года на вооружении состоят девять комплектов этой системы (27 аппаратов). Адаптированный вариант исследовательского аппарата "Ремус-100" - АСАТ IV-T Мк 14 Mod 0 SAHRV поставляется подразделениям ССО. Благодаря высоким тактико-техническим характеристикам переносные аппараты указанных типов широко используются не только в ВМС США (около 50), но и во флотах Великобритании, Германии, Италии, Нидерландов, Бельгии, Норвегии, Швеции, Финляндии, Эстонии, Сингапура, Австралии и Новой Зеландии (более 30 образцов). С 2010 года на вооружение американских спецотрядов разминирования поступает система "Силайон", включающая три аппарата "Блюфин-9" (масса 50 кг, длина 1,65 м, диаметр 240 мм, скорость 2-5 уз, продолжительность работы 12 ч) с увеличенной до 200 м глубиной применения. Они оснащаются аналогичными по характеристикам ГБО и видеокамерами. Наряду с этим фирма "L-З коммьюникейшн оушен системз" разработала экспериментальный образец переносного подводного аппарата-ликвидатора мин - EMD Мк 8 (Expendable Mine Destructor). Аппарат (масса 28 кг, длина 1,05 м, диаметр 200 мм, наибольшая скорость 12 уз, продолжительность выполнения задачи 15 мин при скорости 8 уз или 2 ч при 4 уз, глубина применения 2-300 м) оборудован двумя телевизионными камерами и ГЛС с дальностью действия до 50 м. Данные от ГЛС и видеоизображение цели передаются по волоконно-оптическому кабелю на дисплей корабельной системы управления для дальнейшего анализа и идентификации мины. Боевое зарядное отделение аппарата (масса 16 кг) может комплектоваться зарядом ВВ кумулятивного или фугасного действия. Американские специалисты в рамках программы "Сравнительные испытания образцов иностранного вооружения и военной техники" проводят работы с АНПА "Гавиа" (масса 44 кг, длина 1,7 м, диаметр 200 мм, скорость до 6 уз, продолжительность работы до 30 ч), который разработан исландской фирмой "Хафмюнд". С учетом положительных результатов его испытаний в 2010 году компания "Теледайн текнолоджиз" получила права на производство этих аппаратов. Конструктивной особенностью АНПА "Гавиа" является модульная комплектация аппарата. Комплекс оборудования включает четыре штатных герметичных модуля (носовой с видеокамерой; управления, связи и навигации; аккумуляторный и движительный). Кроме того, предусматривается использование сменных модулей с полезной нагрузкой, рассчитанных на предельную глубину погружения аппарата и соединяющихся с корпусом при помощи разъемного стыковочного устройства. По оценкам американских специалистов, этот аппарат по своим характеристикам превосходит современные образцы аналогичного класса. В частности, глубина погружения существующих аппаратов составляет 100-200 м, в то время как АНПА "Гавиа", изготовляемый в четырех модификациях (из алюминиевого сплава или высоколегированной стали), может использоваться в районах с глубинами до 200, 500, 1000 и 2000 м при температуре морской воды от -2 до + 35 °С. Для поиска и обнаружения подводных объектов аппарат может оснащаться ГЛС переднего обзора, а для классификации обнаруженных на дне целей - многолучевыми сканирующими ГБО (рабочие частоты от 150 до 1 200 кГц). Сменная полезная нагрузка включает аппаратуру сбора батиметрических (например, профилометр дна) и гидрологических данных, а также цифровую видеокамеру с высоким разрешением и др. Модификация аппарата с глубиной погружения 200 м находится в опытовой эксплуатации в 1-м специальном отряде разминирования ВМС США. В соответствии с контрактом стоимостью 10 млн долларов предусматривается закупка до 10 АНПА "Гавиа" в различной комплектации. В 2008 году один из них (с глубиной погружения до 1 000 м) поставлен ВМС Австралии, а в 2009-м два аппарата минной разведки приобретены Португалией. Наиболее современной системой минной разведки на базе малогабаритных 324-мм АНПА является Мк 18 Mod. 2 "Кингфиш" фирмы "Нортроп-Грумман", морские испытания которой начались в июле 2012 года. Она включает три аппарата (масса 272 кг, длина 3,5 м, глубина применения 5-300 м. продолжительность работы до 10 ч при поисковой скорости хода 4,5 уз), разработанных на базе исследовательского аппарата "Ремус-600" компании "Гидроид-Конгсберг". В состав энергосиловой установки входит литиево-ионная аккумуляторная батарея мощностью 5,2 кВт и электромотор, работающий на двухлопастный гребной винт. Рулевые поверхности ориентированы по направлениям 0°-120°-240°, что уменьшает диаметр циркуляции и существенно снижает возможность провала аппарата по глубине. В базовой комплектации АНПА оснащается ГБО с динамической фокусировкой антенн (рабочая частота 850 кГц), видеокамерой (с подсветкой), датчиками температуры и электропроводности морской воды. Для эффективного поиска полностью заглубленных в грунт мин он может оснащаться ГБО с синтезированной апертурой антенн. При этом для сохранения маневренных характеристик аппарата, имеющего увеличенную на 1 м длину и большую на 44,5 кг массу за счет наличия сменного модуля с гидролокатором, на нем устанавливается дополнительный носовой отсек с рулевыми плоскостями. В случае успешного завершения программы испытаний планируется достичь "первоначальной боеспособности" системы в ill квартале 2013 года. Стоимость серийного образца составит, по оценкам разработчиков, около 100 тыс. долларов. Фирма "Дженерал дайнэмикс" создает систему минной разведки "Найффиш" с 533-мм АНПА. Она будет включена в состав сменного комплекта противоминного вооружения корветов типов "Фридом" и "Индепенденс". В разрабатываемом в габаритах стандартного 20-футового контейнера специальном модуле предусматривается размещать два аппарата, элементы спускоподъемного устройства и второй комплект АБ, а также оборудовать АРМ оператора. Основной элемент этой системы -АНПА (длина 6,1 м, диаметр 533 мм, масса 1 360 кг, глубина применения 12-300 м) - создается на базе находящего в опытовой эксплуатации подводного аппарата BPUV/"Блюфин-21" (масса 363 кг, диаметр 533 мм, длина 3,2 м, поисковая скорость 3-4 уз, продолжительность поиска до 16 ч, поисковая производительность 0,12 мил ь2/ч, ширина полосы поиска 150 м, глубина применения 12-300 м) фирмы "Блюфин роботекс", которая является субподрядчиком работ по программе. Для снижения заметности по физическим полям и массогабаритных показателей в конструкции аппарата планируется наряду с алюминиевыми сплавами использовать многослойные композиционные материалы (КМ) и армированный стеклопластик. В состав энергосиловой установки будут включены две модульные литий-ионные АБ и электромотор, работающий на трехлопастный гребной винт в кольцевой насадке. Последний, изготовленный из КМ, представляет собой единую движительно-рулевую систему на шарнирной основе. Применение такой схемы крепления обеспечит высокую маневренность аппарата, особенно на малых и сверхмалых ходах. Автономность АНПА, по расчетам разработчиков, составит не менее 16 ч при скорости хода 6 уз. Основой бортовой поисковой аппаратуры станет низкочастотный ГБО с синтезированной апертурой антенны и повышенной разрешающей способностью, разрабатываемый фирмой "Ультра электронике" совместно с лабораторией прикладных исследований Пенсильванского государственного университета. Полученные от гидролокатора данные предусматривается записывать на съемный жесткий магнитный накопитель RDSM (Removable Data Storage Module) объемом памяти 12 ТБ. Они будут обрабатываться после приема аппарата на борт корабля-носителя. Корабельные программно-аппаратные средства кроме планирования операции, ввода данных и др. позволят осуществлять автоматизированную обработку и анализ полученной информации путем сравнения с данными библиотеки цифровых шаблонов по всем морским минам (или им подобным объектам). В ноябре 2011 года заключен контракт на сумму 48,61 млн долларов (предусмотрен опцион до 86,72 млн) на разработку опытного образца и предсерийной партии из пяти систем (10 аппаратов). К демонстрационным испытаниям планируется приступить не позднее 2015 года, с тем чтобы достичь "первоначальной боеготовности" системы в 2017-м. На 2019 год намечены начало серийного производства и поставки в ВМС 24 систем "Найффиш", а также шести учебно-тренировочных комплектов. Кроме того, фирма "Гидроид" по заказу океанографического управления ВМС США разработала глубоководный аппарат "Ремус-6000" (масса 0,9 т, длина 4,1 м, диаметр корпуса 0,6 м, поисковая скорость 4 уз, автономность 12 ч), предназначенный для проведения высокоточного картографического исследования океанского дна. Его корпус, изготовленный из титанового сплава, рассчитан на предельную глубину погружения 6 000 м. Сменная полезная нагрузка аппарата включает ГБО (рабочие частоты 300/900 кГц), профилометр дна (рабочие частоты 30/200 кГц) и видеокамеру с подсветкой. В настоящее время в ВМС США эксплуатируются два таких аппарата. Вместе с тем, как считают американские специалисты, в целях скрытного сбора гидрологической информации в районах предстоящих операций более эффективно применение планирующих и дрейфующих автономных подводных аппаратов, обладающих повышенной автономностью (несколько месяцев) и малой гидроакустической заметностью. Такие АНПА оборудованы бортовыми измерительно-информационными комплексами, которые периодически передают собранные и частично обработанные данные измерений по одному или двум каналам управления и связи: гидроакустическому (на систему якорных донных станций) и воздушно-космическому (на искусственный спутник Земли при периодических всплытиях в позиционное положение). Перемещение аппарата-планера в водной среде по глубине и в горизонтальной плоскости (по так называемым наклонным траекториям) осуществляется за счет изменения остаточной плавучести. Конструктивной особенностью планирующего в толще воды АНПА является отсутствие традиционной силовой установки (гребного винта, подруливающих устройств и т. п.), вместо которой аппарат-планер оснащается съемными консолями, кормовыми стабилизаторами, а также системой автоматического управления плавучестью (САУП), формирующей управляющее воздействие в виде изменения величины и знака его остаточной плавучести. Исполнительный тракт САУП состоит из сообщающихся балластной цистерны (размешается в прочном корпусе аппарата) и изготовленной из эластомера емкости (в проточном отсеке), блока распределительных электромагнитных клапанов и гидронасоса рабочей жидкости (минеральное масло). Аппарат имеет постоянное массовое водоизмещение, но его объемное водоизмещение может изменяться при подаче (откачке) рабочей жидкости в эластичную емкость из балластной цистерны прочного корпуса. Исполнительный тракт САУП является основным потребителем энергии от бортового источника. Таким образом, автономность АНПА-планера в значительной степени зависит как от типе исполнительного тракта, так и от принятого алгоритма работы САУП. Так, американской фирмой "Теледайн веб рисёрч" разработаны подводные аппараты-планеры типа "Слокум". оснащенные двумя энергетическими установками -электрической и термальной. При спуске на волу аппарат (масса 52 кг, длина 1,5 м и диаметр 213 мм) с двумя щелочными АБ (на 260 элементов) постепенно погружается по пологой наклонной траектории со средней скоростью 0,8 уз до глубины 200 м. Затем он всплывает по восходящей к поверхности траектории, и далее цикл повторяется. В зависимости от состава бортовой аппаратуры такой аппарат способен в течение 20-30 сут передавать данные на береговой центр сбора и обработки информации по маршруту плавания протяженностью до 1 500 км. В состав сменной полезной нагрузки могут входить: датчики измерения на различных горизонтах глубин температуры, солености, плотности, удельной электрической проводимости морской воды, а также гидрофотометр, звукометрическая аппаратура, гидрофон и датчики для измерения элементов поверхностных и глубинных течений. Управление АНПА осуществляется по программе бортового процессора с использованием магнитного компаса, считывающего устройства, глубиномера, кренометра и дифферентометра. Каждые 2-3 ч производится всплытие в позиционное положение для обмена данными с береговым центром сбора и обработки информации с помощью аппаратуры системы спутниковой связи "Иридиум", а также для уточнения местоположения по данным КРНС "Навстар". Антенные устройства приемника КРНС и аппаратуры радиосвязи установлены на вертикальном стабилизаторе. Автономность аппарата-планера "Слокум" с термальной силовой установкой (на основе так называемой термальной машины, которая, по сути, заменяет собой упомянутую выше масляную помпу, но работает не от бортового источника энергии, а использует разницу температуры воды на различных горизонтах глубин) может составить до 330 сут. Используемая в САУП аппарата "термальная машина" эффективна в режимах планирования с достаточно большим диапазоном глубин, поэтому рабочая глубина аппарата достигает 1 500 м. Созданный на базе "Слокум" аппарат "Скарлem Найт" пересек Атлантический океан в восточном направлении, пройдя за 221 сут (с апреля по декабрь 2009 года) расстояние в 11 745 км и установив, таким образом, рекорд по автономности и дальности плавания. При этом было выполнено 11000погружений и всплытий, проведено около 1000 сеансов обмена данными с береговым центром сбора и обработки информации и определения места. На базе аппарата "Слокум" фирма "Теледайн браун инжиниринг" разрабатывает перспективный АНПА планерного типа LBS-G (Littoral Battlespace Sensing-Gliders), предназначенный для применения в сложных гидрологических условиях прибрежных районов. На современном этапе американцы используют 12 подводных аппаратов-планеров различного типа, включая три типа "Слокум". К 2014 году планируется довести их общее количество до 250 единиц. Многоцелевые ПЛА типов "Лос-Анджелес" и "Виргиния" ВМС США намечалось оснащать системой поиска мин AN/BLQ-11 фирмы "Боинг". Основными ее элементами являются два АНПА (радиус действия 120 миль, продолжительность поиска 40 ч при скорости 6 уз, поисковая производительность до 50 миль:/сут, глубина применения 12-475 м). В состав бортовой аппаратуры входят гидроакустическая станция переднего обзора с шириной полосы поиска 500 м и ГБО, обладающий высокой разрешающей способностью (10х10 см на расстоянии 100 м). Американские специалисты первыми реализовали на практике концепцию многократного использования АНПА с лодок в подводном положении. Подводные аппараты системы AN/BLQ-11 применяются из торпедных аппаратов (ТА). Для их обратного приема задействуются два ТА одного борта. В верхнем из них размещается выдвижной телескопический манипулятор длиной 18 м, осуществляющий захват АНПА и направляющий его в нижнюю трубу. К недостаткам такого способа относятся необходимость использования двух ТА из четырех, а также уменьшение стеллажного боезапаса с 26 до 16-18 единиц оружия. С учетом этого, а также принимая во внимание сравнительно высокую стоимость системы (около 1,8 млн долларов), в опытовой эксплуатации находится один комплект (всего предполагалось закупить 12-16 систем). Наработки, полученные в ходе эксплуатации системы AN/BLQ-11, применены при создании многоцелевого подводного аппарата MRUUV (масса 1 275 кг, длина 6,5 м). Согласно предъявляемым требованиям, он должен дополнительно обеспечить детальное картографирование морского дна. Для этого АНПА оснащается аппаратурой высокоточного картографирования L-PUMA и гидроакустической станцией SAS с синтезированной апертурой, обладающей высокой разрешающей способностью (2,5 х 2,5 см на расстоянии 70 м). К полномасштабным испытаниям аппарата специалисты ВМС приступили в 2010 году. Боевой подводный аппарат разрабатывался с 1996 года специалистами центра подводных систем вооружения ВМС США (Ньюпорт, штат Род-Айленд) с привлечением ряда компаний в рамках долгосрочной программы "Манта". Прорабатывалось несколько его вариантов длиной от 15 до 25 м и массой 50-90 т. Ожидалось, что этот аппарат будет способен развивать высокую скорость хода (до 60 уз), самостоятельно вести морскую разведку в прибрежных районах, осуществлять поиск, обнаружение и поражение подводных целей противника торпедами, в том числе перспективными суперкавитирующими. В качестве носителей таких аппаратов рассматривались многоцелевые атомные подводные лодки. До четырех аппаратов с корпусом плоской формы, напоминающей ската и не ухудшающей гидродинамических характеристик и акустических сигнатур носителя, предполагалось размешать в его носовой оконечности. Для подтверждения реализуемости концепции, отработки и внедрения критичных технологий в 1999 году была создана демонстрационная модель аппарата MTV (Manta Test Vehicle). Масса АНПА 7 т, длина 10,4 м, наибольшая скорость 10 уз. автономность 13 ч при скорости 5 уз. В настоящее время он не эксплуатируется в связи с переориентированием исследований на другую программу. В частности, с 2011 года министерством ВМС активизированы работы в области создания крупногабаритного боевого АНПА LDUVV (Large Displacement Unmanned Undersea Vehicle). В рамках реализуемого в настоящее время научно-исследовательским управлением ВМС (ONR) этапа концептуальных исследований, по завершении в марте 2013 года фазы оценки альтернатив (Evaluation of Alternatives), должны быть определены оперативно-тактические и тактико-технические требования к боевому АНПА, перечень необходимых технологических исследований, предварительная стоимость его жизненного цикла и др. Вместе с тем командование американских ВМС уже обозначило свои предварительные общие требования к данному классу подводных аппаратов. Согласно концепции крупногабаритный АНПА (длина около 6 м, диаметр 1,6-1,8 м, рабочая глубина до 250 м, скорость хода до 6 уз) должен будет в течение не менее 70 сут (включая время на развертывание и возвращение в пункт базирования) выполнять боевые и специальные задачи в удаленных морских (океанских) районах. Основу его бортового вооружения должны составить четыре 324-мм торпеды и выставляемые гидроакустические датчики (до 16 единиц). Как предполагается, такие аппараты будут применяться с береговых пунктов, надводных кораблей, а также из шахтной пусковой установки (ШПУ) многоцелевых П Л А типа "Виргиния" (начиная с третьей полсерии), а также с атомных подводных лодок с крылатыми ракетами (ПЛАРК) типа "Огайо". Требования к массогабаритным характеристикам аппарата во многом определяются размерами ШПУ этих лодок (диаметр 2,2 м, высота 7 м). К демонстрационным испытаниям прототипа данного АНПА, создаваемого на базе аппарата "Протеус" (масса 3,7 т, масса полезной нагрузки 1.6 т, длина 7,6 м, продолжительность работы 92 ч при скорости 6 уз) совместной разработки фирм "Блюфин роботекс" и "Коламбия групп", планируется приступить в 2015 году. В 2012 году на исследования по этой программе израсходовано около 50 млн долларов. Принятие окончательного решения о дальнейшей разработке новой системы должно состояться не позднее 2017 года, а начало предсерийного производства 10 аппаратов намечено на 2020-й. В целом программа характеризуется повышенными технологическими и финансовыми рисками. Так, по предварительным оценкам, стоимость серийного образца (без оружия и выставляемых датчиков) может составить не менее 75 млн долларов, а затраты на его эксплуатацию в течение 20 лет - около 700 млн. Несмотря на очевидные достижения американских разработчиков в области создания подводных аппаратов, существуют значительные проблемы технического характера, решение которых требует применения нестандартных инженерных решений и внедрения инновационных технологий. К одной из наиболее критичных из них относится создание компактной энергетической установки на основе электрохимического генератора (ЭХГ), обеспечивающего большую автономность аппарата и электропитание потребителей расширенной номенклатуры. Другая проблема - разработка бортового навигационно-поискового комплекса и системы управления с элементами "искусственного интеллекта", обеспечивающих эффективную оценку подводной и надводной обстановки, а также уклонение от различных препятствий (в том числе сложно обнаруживаемых и идентифицируемых промысловых тралов и морского льда). Кроме того, актуальны выбор подсистемы охлаждения вычислительного комплекса и необходимость минимизации эксплуатационных рисков, связанных с обрастанием корпуса, обеспечением живучести, взрыво- и пожаробезопасности. В настоящее время в рамках подпрограммы LEUVP (Long Endurance Undersea Vehicle Propulsion) рядом фирм на конкурсной основе разрабатываются энергетические установки на базе ЭХГ на топливных элементах водородно-кислородного типа с твердым полимерным электролитом для 533-мм крупногабаритного АНПА. Одно из направлений работ; относящихся к использованию ЭХГ на борту подводного аппарата, - создание систем хранения и подачи реагентов к топливным элементам. Такие системы должны отвечать высокий требованиям по надежности, безопасности и эксплуатации, а также иметь небольшие массогабаритные показатели. Значительных успехов в этой области добилась фирма "Сиерра Лобо" (НИОКР по данной тематике ведутся с начала 2000-х годов), разработавшая систему хранения и подачи кислорода для обеспечения функционирования ЭХГ (мощностью 10 кВт) 533-мм АНПА. Основными ее элементами являются: ударопрочная криогенная цистерна, представляющая собой сосуд Дьюара, для хранения 50 кг сжиженного кислорода при температуре около 180°С; испаритель, предназначенный для перевода сжиженного кислорода в газообразное состояние; подогреватель кислорода, а также трубопроводы и арматура. С 2010 года проводятся полномасштабные стендовые испытания оборудования, которое размещается вместе с батареей топливных элементов ЭХГ в секции длиной 254 см. В свою очередь, группа компаний под руководством "Некстэк мэтириэлз" в рамках заключенного в мае 2012 года контракта с научно-исследовательским управлением ВМС на сумму 18 млн долларов разрабатывает ЭХГ с бортовым генератором водорода (газ вырабатывается из жидкого углеводородного топлива JP-I0 с использованием не содержащего благородных металлов оксидного катализатора).
Кроме того, разработчики признают, что достигнутый уровень развития технологий
не обеспечивает требуемых устойчивости и скорости передачи больших объемов
информации с АНПА на пункты управления по каналам спутниковой и звукоподводной
связи в масштабе времени, близком к реальному (что особенно критично при борьбе
с минной угрозой). Важно также реализовать концепцию группового применения таких
аппаратов, которая предусматривает опознавание и обмен данными между ними в
целях взаимного ориентирования и распределения задач. Зарубежное военное обозрение №2013 №5 С.79-88 Смотрите также | |||||||||||||||||
|
| |||||||||||||||||
| Просмотров: 23690 | | | |||||||||||||||||





| Всего комментариев: 0 | |