







Возможности современных РЛС с синтезированием апертуры антенныКапитан М. Виноградов, Современные радиолокационные средства, устанавливаемые на самолетах и космических аппаратах, в настоящее время представляют один из наиболее интенсивно развивающихся сегментов радиоэлектронной техники. Идентичность физических принципов, лежащих в основе построения этих средств, делает возможным рассмотрение их в рамках одной статьи. Основные различия между космическими и авиационными РЛС заключаются в принципах обработки радиолокационного сигнала, связанными с различным размером апертуры, особенностями распространения радиолокационных сигналов в различных слоях атмосферы, необходимостью учета кривизны земной поверхности и т. д. Несмотря на подобного рода различия, разработчики РЛС с синтезированием апертуры (РСА) прилагают все усилия для того, чтобы добиться максимальной схожести возможностей данных средств разведки. В настоящее время бортовые РЛС с синтезированием апертуры позволяют решать задачи видовой разведки (вести съемку земной поверхности в различных режимах), селекции мобильных и стационарных целей, анализа изменений наземной обстановки, осуществлять съемку объектов, скрытых в лесных массивах, обнаружение заглубленных и малоразмерных морских объектов. Основным назначением РСА является детальная съемка земной поверхности.
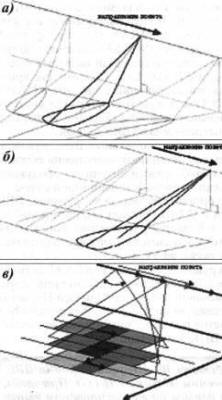
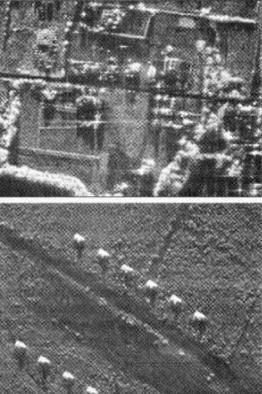
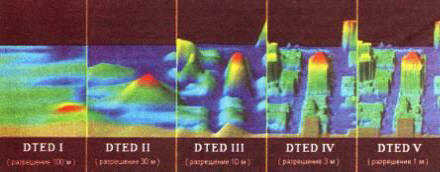
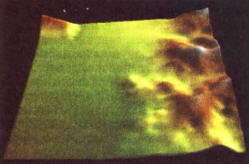
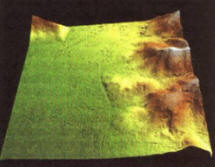
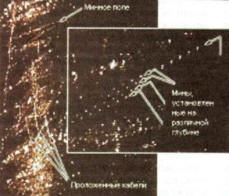
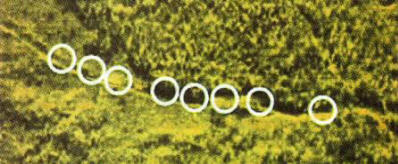
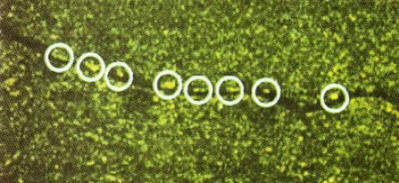
За счет искусственного увеличения апертуры бортовой антенны, основной принцип которого заключается в когерентном накоплении отраженных радиолокационных сигналов на интервале синтезирования, удается получить высокое разрешение по углу. В современных системах разрешение может достигать десятков сантиметров при работе в сантиметровом диапазоне длин волн. Аналогичные значения разрешения по дальности достигаются за счет применения внутриимпульсной модуляции, например, линейно-частотной модуляции (ЛЧМ). Интервал синтезирования апертуры антенны прямо пропорционален высоте полета носителя РСА, что обеспечивает независимость разрешения съемки от высоты. В настоящее время существуют три основных режима съемки земной поверхности: обзорный, сканирующий и детальный (рис. 1). В обзорном режиме съемка земной поверхности осуществляется непрерывно в полосе захвата, при этом разделяют боковой и переднебоковой режим (в зависимости от ориентации главного лепестка диаграммы направленности антенны). Накопление сигнала осуществляется в течение времени, равного расчетному интервалу синтезирования апертуры антенны для данных условий полета носителя РЛС. Сканирующий режим съемки отличается от обзорного тем, что съемка ведется на всей ширине полосы обзора, полосами равными ширине полосы захвата. Данный режим используется исключительно в РЛС космического базирования. При съемке в детальном режиме накопление сигнала осуществляется на увеличенном по сравнению с обзорным режимом интервале. Увеличение интервала осуществляется за счет синхронного с движением носителя РЛС перемещения главного лепестка диаграммы направленности антенны таким образом, чтобы облучаемый участок постоянно находился в зоне съемки. Современные системы позволяют получать снимки земной поверхности и расположенных на ней объектов с разрешениями порядка 1 м для обзорного и 0,3 м для детального режимов. Компания «Сандия» анонсировала создание РСА для тактических БЛА, имеющего возможность вести съемку с разрешением 0,1 м в детальном режиме. Существенное значение на результирующие характеристики РСА (в плане съемки земной поверхности) оказывают применяемые методы цифровой обработки принятого сигнала, важной составляющей которых являются адаптивные алгоритмы коррекции траекторных искажений. Именно невозможность выдерживать в течение длительного времени прямолинейную траекторию движения носителя не позволяет получать в непрерывном обзорном режиме съемки разрешения сопоставимые с детальным режимом, хотя никаких физических ограничений на разрешение в обзорном режиме не существует. Режим инверсного синтезирования апертуры (ИРСА) позволяет осуществлять синтезирование апертуры антенны не за счет движения носителя, а за счет движения облучаемой цели. При этом речь может идти не о поступательном движении, характерном для наземных объектов, а о маятниковом движении (в разных плоскостях), характерном для плавучих средств, раскачивающихся на волнах. Данная возможность определяет основное назначение ИРСА - обнаружение и идентификация морских объектов. Характеристики современных ИРСА позволяют уверенно обнаруживать даже малоразмерные объекты, такие как перископы подводных лодок. Вести съемку в данном режиме имеют возможность все самолеты, состоящие на вооружении ВС США и других государств, в задачи которых входит патрулирование береговой зоны и акваторий. Получаемые в результате съемки изображения по своим характеристикам аналогичны изображениям, получаемым в результате съемки с прямым (неинверсным) синтезированием апертуры. Режим интерферометрической съемки (Interferometric SAR - IFSAR) позволяет получать трехмерные изображения земной поверхности. При этом современные системы имеют возможность вести одноточечную съемку (то есть использовать одну антенну) для получения трехмерных изображений. Для характеристики данных изображений помимо обычного разрешения вводится дополнительный параметр, называемый точность определения высоты, или разрешение по высоте. В зависимости от значения данного параметра определяют несколько стандартных градаций трехмерных изображений (DTED - Digital Terrain Elevation Data): Вид изображений урбанизированной территории (модель), соответствующий различным уровням детализации, представлен на рис. 3. Уровни 3-5 получили официальное название «данных с высоким разрешением» (HRTe-High Resolution Terrain Elevation data). Определение местоположения наземных объектов на изображениях уровня 0-2 ведется в системе координат WGS 84, отсчет высоты осуществляется относительно нулевой отметки. Система координат изображений с высоким разрешением в настоящий момент не стандартизирована и находится на стадии обсуждения. На рис. 4 представлены фрагменты реальных участков земной поверхности, полученные в результате стереосъемки с различным разрешением. В 2000 году американский МТКК «Шаттл» в рамках проекта SRTM (Shuttle Radar Topography Mission), целью которого являлось получение картографической информации крупных масштабов, выполнил интерферометрическую съемку экваториальной части Земли в полосе от 60° с. ш. до 56° ю. ш., получив на выходе трехмерную модель земной поверхности в формате DTED2. Для получения детальных трехмерных данных в США разрабатывается проект NGA HRTe? в рамках которого будут доступны изображения уровней 3-5. Проникающая РЛС (GPR, Ground Penetrating Radar) - система дистанционного зондирования, принцип действия которой основан на обработке сигналов, отраженных от деформированных или отличающихся по своему составу участков, находящихся в однородном (или относительно однородном) объеме. Система зондирования земной поверхности позволяет обнаруживать находящиеся на различной глубине пустоты, трещины, заглубленные объекты, выявлять участки различной плотности. При этом энергия отраженного сигнала сильно зависит от поглощающих свойств почвы, размеров и формы цели, степени неоднородности граничных областей. В настоящее время GPR помимо военно-прикладной направленности развился в коммерчески выгодную технологию. Зондирование земной поверхности происходит путем облучения импульсами с частотой 10 МГц - 1,5 ГГц. Облучающая антенна может находиться на земной поверхности или расположена на борту летательного аппарата. Часть энергии облучения отражается от изменений в подповерхностной структуре земли, большая же часть проникает дальше в глубину. Отраженный сигнал принимается, обрабатывается, и результаты обработки отображаются на дисплее. При движении антенны генерируется непрерывное изображение, отражающее состояние подповерхностных слоев почвы. Так как фактически отражение происходит из-за различия ди-электрических проницаемо-стей различных веществ (или разных состояний одного вещества), то зондированием можно выявлять большое количество естественных и искусственных дефектов в однородной массе подповерхностных слоев. Глубина проникновения зависит от состояния почвы на месте облучения. Уменьшение амплитуды сигнала (поглощение или рассеяние) в значительной мере зависит от ряда свойств почвы, основное из которых - ее электропроводность. Так, оптимальными для зондирования являются песчаные почвы. Гораздо менее пригодны для этого глинистые и очень влажные почвы. Хорошие результаты показывает зондирование сухих материалов, таких как гранит, известняк, бетон. Разрешениепризондированииможетбыть улучшено за счет повышения частоты излучаемых волн. Однако увеличение частоты отрицательно сказывается на глубине проникновения излучения. Так, сигналы с частотой 500-900 МГц могут проникать на глубину 1-3 м и обеспечивают разрешение до 10 см, а с частотой 80-300 МГц проникают на глубину 9-25 м, но разрешение составляет порядка 1,5 м. Основным военным назначением РЛС подповерхностного зондирования является обнаружение заложенных мин. При этом РЛС, установленная на борту летательного аппарата, например вертолета, позволяет непосредственно вскрывать карты минных полей. На рис. 5 представлены изображения, полученные с помощью РЛС, установленной на борту вертолета, отражающие расположение противопехотных мин. Бортовая РЛС, предназначенная для обнаружения и слежения за объектами, скрытыми в лесных массивах (FO-PEN - FOliage PENetrating), позволяет обнаруживать малоразмерные объекты (движущиеся и стационарные), скрытые кронами деревьев. Съемка объектов, скрытых в лесных массивах, ведется аналогично обычной съемке в двух режимах: обзорном и детальном. В среднем в обзорном режиме ширина полосы захвата составляет 2 км, что позволяет получать на выходе изображения участков земной поверхности 2x7 км; в детальном режиме съемка осуществляется участками 3х3 км. Разрешение съемки зависит от частоты и варьируется от 10 м при частоте 20-50 МГц до 1 м при частоте 200-500 МГц. Современные методы анализа изображений позволяют с достаточно высокой вероятностью обнаруживать и производить последующую идентификацию объектов на полученном радиолокационном изображении. При этом обнаружение возможно на снимках как с высоким (менее 1 м), так и с низким (до 10 м) разрешением, в то время как для распознавания требуются изображения с достаточно высоким (порядка 0,5 м) разрешением. И даже в этом случае можно говорить в большей части только о распознавании по косвенным признакам, поскольку геометрическая форма объекта очень сильно искажена из-за наличия сигнала, отраженного от лиственного покрова, а также вследствие появления сигналов со смещением частоты за счет доплеровского эффекта, возникающего в результате колебания листвы на ветру. На рис. 6 представлены изо-бражения (оптическое и радиолокационное) одного и того же участка местности. Объекты (колонна машин), невидимые на оптическом изображении, хорошо видны на радиолокационном, однако осуществить идентификацию данных объектов, абстрагировавшись от внешних признаков (движение по дороге, расстояние между машинами и т. д.), невозможно, так как при данном разрешении информация о геометрической структуре объекта отсутствует полностью. Детальность получаемых радиолокационных изображений позволила реализовать на практике еще ряд особенностей, которые, в свою очередь, сделали возможным решение ряда важных практических задач. К одной из таких задач относится отслеживание изменений, произошедших на некотором участке земной поверхности за определенный период времени - когерентное детектирование. Длительность периода обычно определяется периодичностью патрулирования заданного района. Отслеживание изменений осуществляется на основе анализа покоординатно совмещенных изображений заданного района, полученных последовательно друг за другом. При этом возможны два уровня детализации анализа.
Первый уровень предполагает обнаружение значительных изменений и основывается на анализе амплитудных отсчетов изображения, несущих основную визуальную информацию. Чаще всего в эту группу относятся изменения, которые сможет увидеть человек, просматривая одновременно два сформированных радиолокационных изображения. Второй уровень базируется на анализе фазовых отсчетов и позволяет выявлять изменения, невидимые человеческому глазу. К таковым можно отнести появление следов (машины или человека) на дороге, изменение состояния окон, дверей («открыто - закрыто») и т. д. При анализе фазовой картины большую роль играет выбор порога срабатывания детектора. При низком пороге срабатывания будет детектироваться большое количество паразитных изменений, вплоть до колебания травы на ветру, что приведет к невозможности получения нужной информации о состоянии района. Кроме того, при низком пороге будут сказываться погрешности, связанные с неоптимальностью совмещения изображений, так как ни один алгоритм в настоящее время не дает абсолютно точной привязки одного изображения к другому. Другой интересной возможностью РСА, также анонсированной компанией «Сандия», является радиолокационная видеосъемка. В данном режиме дискретное формирование апертуры антенны от участка к участку, характерное для непрерывного обзорного режима, заменено на параллельное многоканальное формирование. То есть в каждый момент времени синтезируется не одна, а несколько (количество зависит от решаемых задач) апертур. Своего рода аналогом количества формируемых апертур является частота кадров в обычной видеосъемке. Данная возможность позволяет реализовывать селекцию движущихся целей на базе анализа полученных радиолокационных изображений, применяя принципы когерентного детектирования, что является по своей сути альтернативой стандартным РЛС, осуществляющим селекцию движущихся целей на основе анализа до-плеровских частот в принятом сигнале. Эффективность реализации подобных селекторов движущихся целей весьма сомнительна ввиду значительных аппаратно-программных затрат, поэтому подобные режимы с большой вероятностью так и останутся не более чем изящным способом решения задачи селекции, несмотря на открывающиеся возможности селектировать цели, движущиеся с очень низкими скоростями (менее 3 км/ч, что недоступно доплеровским СДЦ). Непосредственно видеосъемка в радиолокационном диапазоне в настоящее время также не нашла применения, опять же из-за высоких требований к быстродействию, поэтому действующих образцов военной техники, реализующих на практике данный режим, нет. Логическим продолжением совершенствования техники съемки земной поверхности в радиолокационном диапазоне является развитие подсистем анализа полученной информации. В частности, важное значение приобретает разработка систем автоматического анализа радиолокационных изображений, позволяющих обнаруживать выделять и распознавать наземные объекты, попавшие в зону съемки. Сложность создания подобных систем связана с когерентной природой радиолокационных изображений, явления интерференции и дифракции в которых приводят к появлению артефактов - искусственных бликов, аналогичных тем, которые появляются при облучении цели с большой эффективной поверхностью рассеяния. Кроме того, качество радиолокационного изображения несколько ниже, чем качество аналогичного (по разрешению) оптического изображения. Все это приводит к тому, что эффективных реализаций алгоритмов распознавания объектов на радиолокационных изображениях в настоящее время не существует, но количество работ, проводимых в данной области, определенные успехи, достигнутые в последнее время, позволяют предположить, что в недалеком будущем можно будет вести речь об интеллектуальных беспилотных разведывательных аппаратах, имеющих возможность производить оценку наземной обстановки по результатам анализа информации, полученной собственными бортовыми средствами радиолокационной разведки. Другим направлением развития является комплексирование, то есть согласованное объединение с последующей совместной обработкой, информации от нескольких источников. Это могут быть РЛС, ведущие съемку в различных режимах, либо РЛС и другие средства разведки (оптические, ИК, многоспектральные и т. п.). Таким образом, современные РЛС с синтезированием апертуры антенны позволяют решать широкий спектр задач, связанных с ведением радиолокационной съемки земной поверхности независимо от времени суток и погодных условий, что делает их важным средством добывания информации о состоянии земной поверхности и находящихся на ней объектах. Зарубежное военное обозрение №2 2009 С.52-56 Смотрите также | |||||||||||||||||||||||
|
| |||||||||||||||||||||||
| Просмотров: 26684 | | | |||||||||||||||||||||||

| Всего комментариев: 0 | |