







Состояние и планы развития наземных робототехнических комплексов СШАПолковник В. Русинов За рубежом роботизированные комплексы рассматриваются как один из атрибутов военной техники будущего. Наиболее интенсивно разработка наземных роботов военного назначения ведется в США. В настоящее время наземный роботизированный комплекс состоит из дистанционно управляемой машины (ДУМ) и пульта управления. ДУМ различаются размерами, перечнем выполняемых задач, конструкцией шасси, конфигурацией корпуса. По степени автоматизации машины могут быть дистанционно управляемыми, а также автономными (действуют по заранее установленной в бортовой компьютер программе). Согласно функциональному назначению все машины можно разделить на разведывательные, инженерные, боевые и тыловые. Разведывательные ДУМ предназначены для наблюдения за обстановкой, поиска целей и их распознавания. Разведка и наблюдение роботизированными средствами должны обеспечивать сбор разведданных об обстановке в зоне военных действий с последующей передачей полученной информации оператору и/или в единый аналитический центр. Машины данного класса являются в настоящее время самыми легкими роботизированными средствами военного назначения.
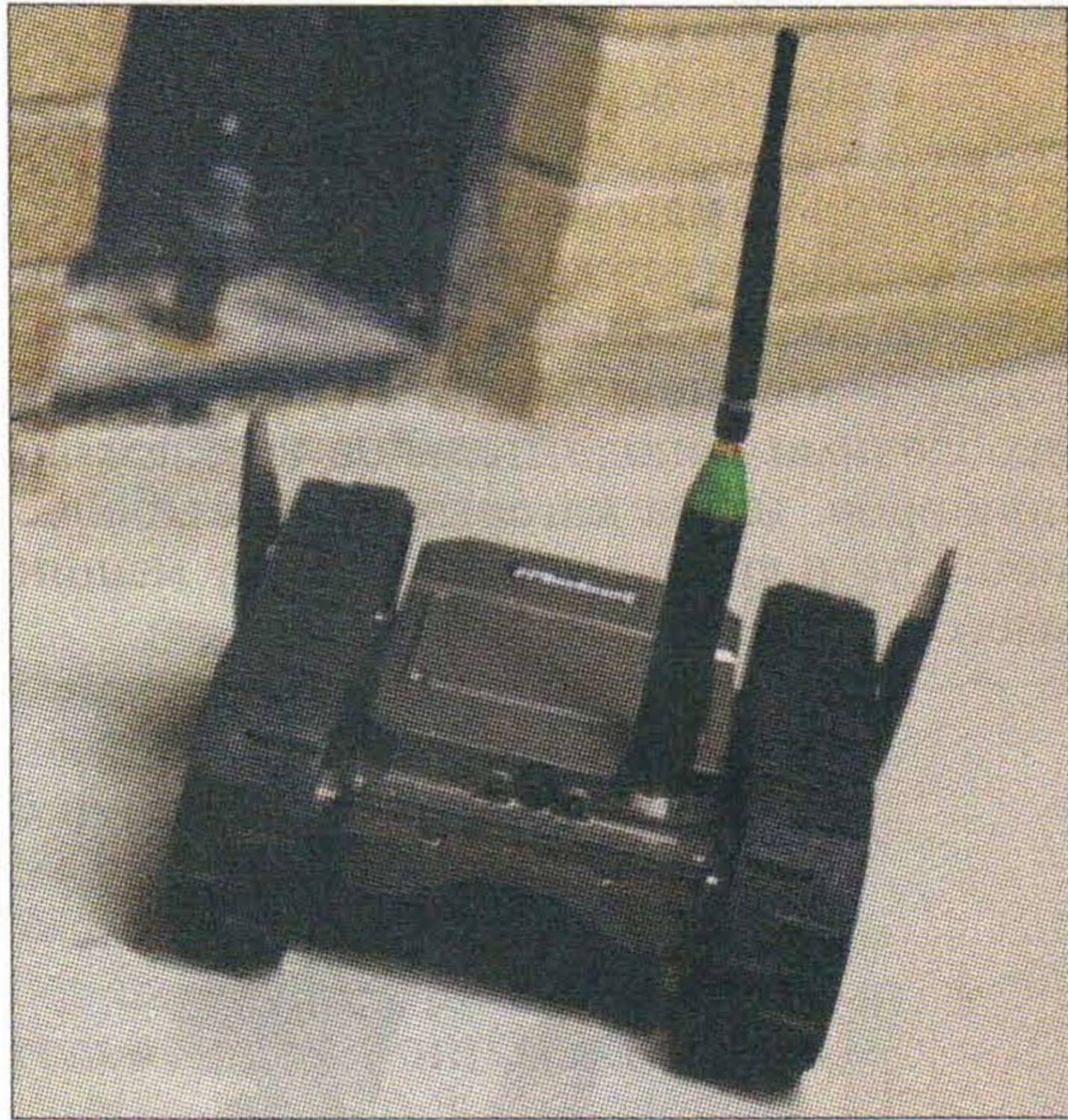
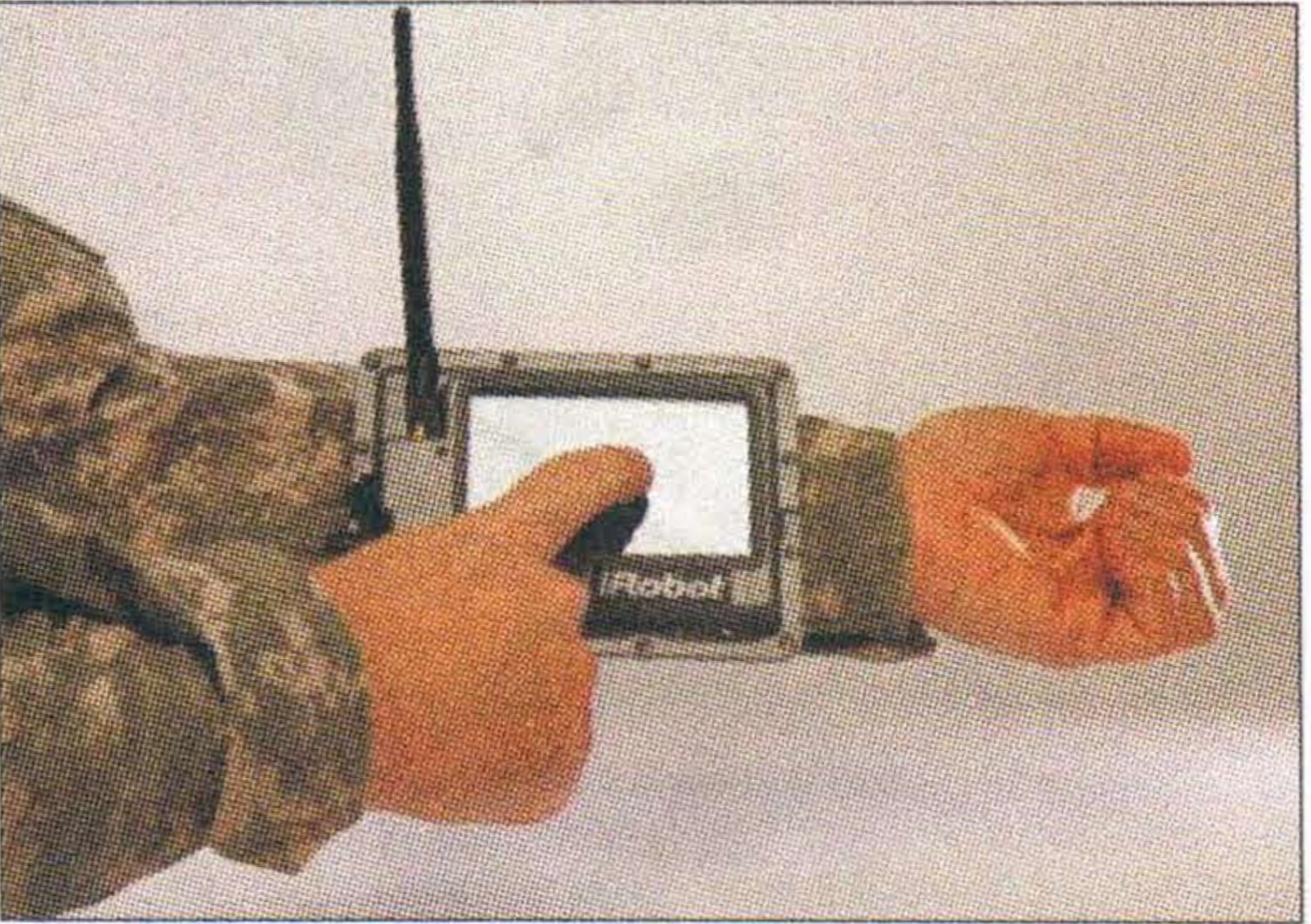
Из состоящих на вооружении и используемых в Афганистане разведывательно-дозорных мини-роботов самым малоразмерным считается ДУМ Recon Scout массой 1,3 кг и длиной 200 мм. Средство оборудовано видеокамерой дневного видения и инфракрасной камерой. При необходимости его можно забрасывать через укрытия, преграды (заборы, ограждения), в оконный проем. Recon Scout способен перемещаться только по относительно ровной поверхности. С целью выполнения более широкого перечня задач созданы ДУМ с гусеничными и колесными шасси. Одним из представителей гусеничных роботизированных мини-машин является изделие First Look 110. Масса этого образца не превышает 2,2 кг с размерами 250х230х100 мм. Пульт управления носится на запястье. Он оснащен сенсорным экраном и цифровым приемопередатчиком, работающем на частотах 5,8 или 2,4 ГГц. Из нескольких аппаратов можно составить сеть, которая позволит увеличить дальность дистанционного управления и расширить площадь обозреваемой территории. Кроме гусениц машина оборудована вращающимися на 360° пластинами (их принято называть флипперами) для повышения проходимости. First Look 110 может преодолеть препятствие высотой до 20 см практически любой формы, двигаться по песку, выдерживает падение с высоты 4,5 м на бетон и приходить в нормальное состояние после опрокидывания. Максимальная скорость движения аппарата 3,4 км/ч, глубина погружения под воду 90 см, при этом его работа под водой и длительное пребывание в этой среде не предусмотрены. Это средство оснащается четырьмя видеокамерами, направленными вперед, назад, вправо и влево. При слабом освещении осуществляется подсветка в инфракрасном спектре. Размеры аппарата позволяют размещать и другие приборы, например тепловизор, датчики радиационного, химического и бактериологического (РХБ) заражения. В дальнейшем на нем могут быть установлены средства двусторонней звуковой связи. В сухопутных войсках и морской пехоте США широкое распространение получили колесные разведывательные ДУМ SpyRobot и Dragon Runner. ДУМ SpyRobot выпускается в двух вариантах: с шасси 4х4 и 6х6. Основными задачами, возлагаемыми на безэкипажный комплекс SpyRobot, являются: разведка в городских условиях, использование датчиков различного назначения в заданном районе, участие в поисковых операциях, разведка возможных засад и обнаружение слабых мест в обороне противника. Благодаря повышенной проходимости платформы SpyRobot способна выполнять свои задачи на различных участках местности, в том числе и на недоступных для человека территориях. Машина с включенной аппаратурой выдерживает падение с высоты до 10 м без нарушения работоспособности узлов и аппаратуры. В результате модернизации машины SpyRobot была создана ДУМ Dragon Runner для разведки местности в радиусе эффективной дальности стрельбы стрелкового оружия. Она состоит из передвижной платформы и пульта управления оператора, с возможностью работы с ним одной рукой. Аппарат Dragon Runner с габаритами 230х200х75 мм и массой 9 кг переносится в заплечной укладке, не замедляя темпа передвижения бойца, не ухудшая его боевых способностей и не влияя на комплектацию рюкзака пищей, водой и боеприпасами. Эта полноприводная машина может передвигаться со скоростью 10 км/ч. Система проста в работе - для ее управления достаточно минимального обучения оператора. Она может быть развернута для боевого применения в течение нескольких секунд. ДУМ Dragon Runner снабжена ИК-датчиками для работы ночью, малоразмерной видеокамерой и микрофоном. На платформе установлены небольшие дисплеи, способные работать даже в условиях пустыни.
Благодаря небольшим размерам и высокой прочности деталей, в том числе
аккумуляторов, машину можно забрасывать через любые ограждения, препятствия или
вниз по лестничной клетке. Дальнейшее повышение возможностей роботов связано с существенным увеличением их массы. Например, ДУМ Warrior 710 массой 157,4 кг без аккумулятора и дополнительных гусениц можно уже считать многофункциональной разведывательно-инженерной машиной. Она предназначена для обнаружения, транспортировки и обезвреживания взрывоопасных предметов, расчистки завалов, проделывания проходов и подъема тяжестей. С грузом массой 68 кг этот аппарат может развивать скорость до 12,9 км/ч. Благодаря дополнительным гусеницам он способен преодолевать следующие препятствия: вертикальные стенки высотой до 470 мм, лестницы с углом наклона 45°, брод глубиной 762 мм, рвы шириной до 610 м. Дальность действия пульта дистанционного управления аппаратом Warrior 710 составляет 800 м. На шасси этой ДУМ может также устанавливаться аппаратура для обнаружения радиоактивных, химических и биологических веществ. Безэкипажные инженерные машины массой более 200 кг выполняют задачи разминирования и проделывания проходов в завалах наравне с обычными инженерными. В настоящее время тяжелые инженерные машины являются только дистанционно управляемыми. Машина разминирования MV-4 (или Ml60) массой 5,32 т предназначена для нейтрализации (обезвреживания) противопехотных мин и неразорвавшихся боеприпасов. Дистанционное управление этим средством предусмотрено на расстоянии до 2 км. Поиск и обезвреживание мин осуществляется на глубине их залегания до 320 мм. Кроме бойкового минного трала машина может оборудоваться бульдозерным ковшом, культиватором, катком или захватывающим механизмом. Примером дистанционно управляемой машины разминирования некоторых типов противопехотных и противотанковых мин является модель ABV (Assault Breacher Vehicle). По своим габаритам эта машин сравнима с танком "Абраме". ДУМ оснащена сплошным ножевым минным тралом, двумя зарядами разминирования Мк-155, а также тремя системами: установки дымовой завесы, обозначения проходов в минном поле и дистанционного управления с использованием средств телеметрии. Появление полностью автономного варианта ДУМ ABV ожидается после 2025 года. Разведывательные ДУМ, оснащенные стрелковым оружием или средствами ближнего боя, получили название боевых. В настоящее время в Ираке используется робот Talon UGV, вооруженный пулеметом М249. Возможна также установка вместо пулемета 40-мм четырехствольного гранатомета с боекомплектом 48 гранат.
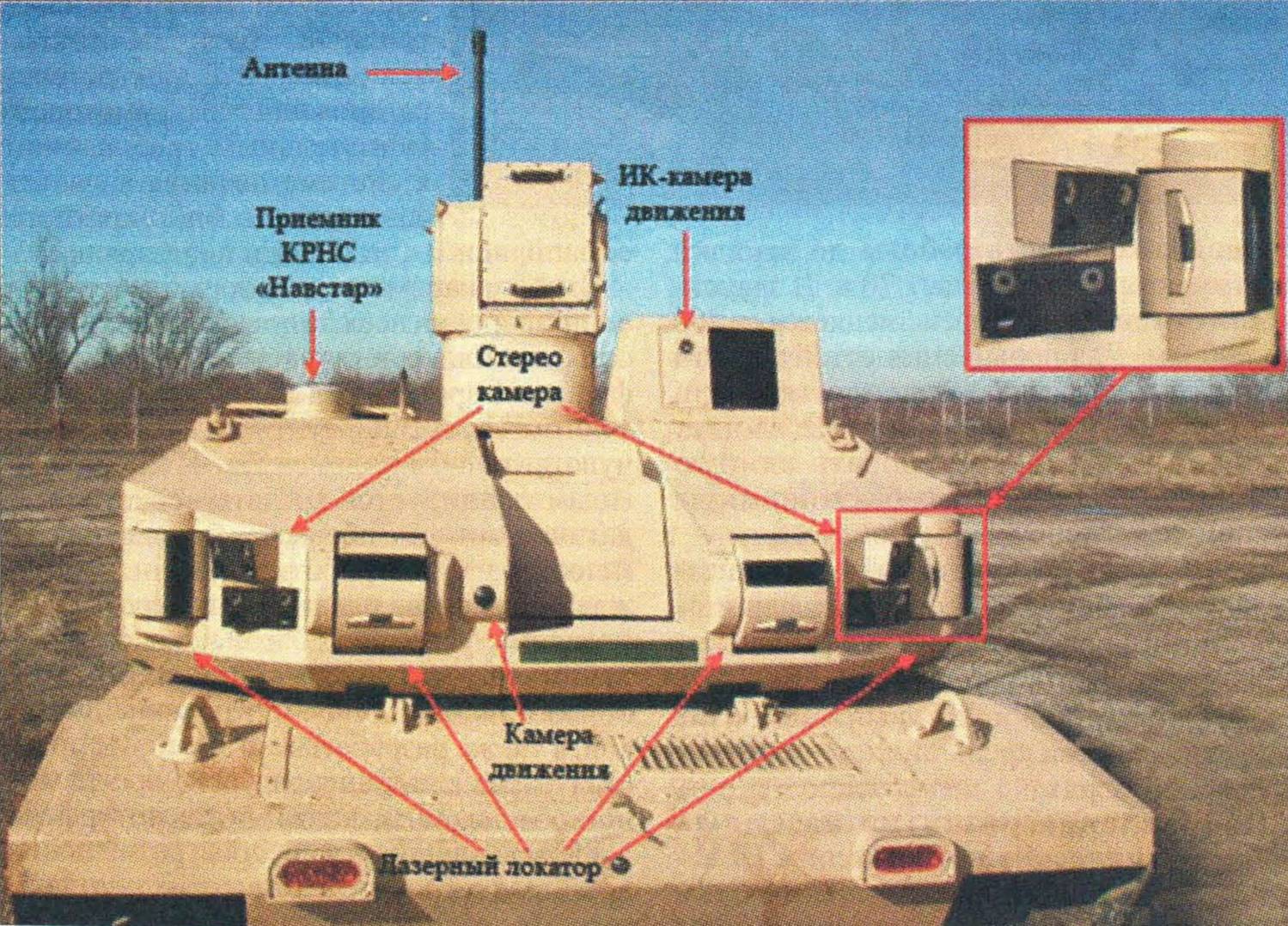
Самым крупным (5х2,4х2 м), боевым роботом в настоящее время можно считать ДУМ Black Knight массой 9,5 т. Пункт управления роботом может размещаться в КШМ или другой боевой бронированной машине со специальным оборудованием. На экране оператор наблюдает за положением вооружения и башни боевого робота. Там же отображается информация, поступающая от разведывательной аппаратуры, установленной на машине. Оператор имеет возможность управлять ДУМ с грунта, наблюдая за ней визуально. Для автономного движения робота используется комплекс приборов и датчиков, включающий видеокамеру, стерео-, и ИК-камеры, лазерные локаторы, приемник КРНС "Навстар". Система полуавтономного управления движением робота обеспечивает маневрирование машины и выбирает оптимальный маршрут движения в любое время суток. Двигатель мощностью 300 л. с. обеспечивает хорошую маневренность на пересеченной местности, а также позволяет развивать максимальную скорость движения по ровной поверхности 77 км/ч. Вооружение ДУМ Black Knight включает 25- или 30-мм автоматическую пушку со спаренным 7,62-мм пулеметом. Для служб тыла, как правило, необходимы роботизированные наземные машины больших размеров, например ДУМ SMSS и R-Gator. Обе безэкипажные машины предназначаются для формирований сил быстрого реагирования и сил специальных операций. Автоматизированная машина подвоза имущества SMSS (Squad Mission Support System) предназначена для обслуживания пехотных отделений или команд из 9-13 человек. Она оснащена колесным (6х6) шасси высокой проходимости и способна перевозить до 450 кг полезной нагрузки. Бортовой компьютер осуществляет управление аппаратурой и механизмами. В отличие от машины SMSS образец R-Gator оснащен подъемным механизмов в виде платформы, подвешенной на цепях, крюком и электродвигателем. Одновременно с аппаратами SMSS и R-Gator хорошо зарекомендовала себя безэкипажная машина "Траккар" (TRAKKAR) с колесной формулой 4х4. Основным ее назначением является перевозка грузов. В зависимости от типа нагрузки это роботизированное средство способно выполнять функции ретрансляционного пункта связи или разведывательного передового пункта либо машины РХБ-разведки. Кроме того, ее можно использовать для вывоза с поля боя раненых или погибших, а также для подвоза имущества, топлива и боеприпасов. При дополнительном оборудовании этот аппарат может решать задачи разминирования и расчистки дорог. ДУМ "Траккар" способна перевозить до 250 кг полезной нагрузки по пересеченной местности, например на ней могут размещаться шесть рюкзаков с экипировкой массой по 40 кг. При движении машина управляется на расстоянии с пульта размером чуть больше ладони. На нем имеются экран и несколько кнопок, три из которых запрограммированы для выполнения машиной следующих команд: "двигаться за оператором", "поднять груз", "вернуться в исходное положение". Кнопки пульта могут быть перепрограммированы на другие действия. Энергопитание безэкипажной машины "Траккар" осуществляется от аккумуляторных батарей и гибридного дизель-электрического генератора. Суммарная продолжительность работы до зарядки аккумуляторов составляет 70 ч. В зависимости от типа шин клиренс меняется от 200 до 300 мм. Для повышения устойчивости аппарат имеет низкий центр тяжести. Конструкция системы позволяет из двух аппаратов "Траккар" собрать единую шарнирно сочлененную безэкипажную машину с колесной формулой 8х8. В интересах ВС США разрабатываются и другие роботизированные машины различного назначения, которые через 15-20 лет смогут заменить обычные средства вооруженной борьбы, позволив сократить потери среди личного состава в боевых условиях. Направления развития наземных робототехнических комплексов США. Развитию научно-технической базы роботизированных средств уделяется большое внимание. Ежегодно план развития на 25 лет корректируется с учетом научно-технических достижений и изменений военно-политической обстановки. Энергоснабжение поставлено военным руководством США на первое место среди всех параметров: выполнение ни одной функции без энергии невозможно. Основное внимание при создании элементов питания нового поколения обращается на снижение их массо-габаритных параметров при увеличении мощности. К 2015-2020 годам планируется оборудовать роботизированные средства миниатюрными аккумуляторными батареями, электрогенераторами, электромоторами. Предполагается, что машина сможет без участия оператора находить и использовать источники энергии. С этой целью запланировано создание аппаратуры, которая обеспечит распознавание источника энергии и идентификацию типа топлива (газ, дизельное топливо, бензин и пр.). Обнаруженным жидким или газообразным топливом робот будет заполнять свои топливные баки для обеспечения энергией электрогенераторов или электромоторов. Обязательным требованием | к системе питания является возможность многократного ее заполнения топливом и перезарядка. Вторым параметром, который важен для оценки уровня всех типов робототехнических комплексов, является возможность функционировать в сложных условиях. Во многом эффективность роботов зависит от чувствительных элементов. К 2015-2020 годам планируется создать всепогодные датчики, которые обеспечат независимость качества работы роботизированных, прежде всего разведывательных, средств от погодных условий. С этой целью совершенствуются существующие алгоритмы обработки данных и оборудование датчиков, а также разрабатываются новые средства управления аппаратурой, программное обеспечение, в том числе интерфейс "человек-машина", и способы размещения приборов на робототехнических платформах. Независимость работы датчиков от погодных условий будет способствовать тому, что наличие осадков или сильного шквалистого ветра не должно снижать вероятность правильной оценки обстановки оператором. Техническое устройство, имея достаточный заряд энергии и возможность работать при любых условиях, в ходе функционирования осуществляет обмен данными как минимум с пунктом управления. При этом важен способ излучения сигнала. При пассивном режиме энергия расходуется минимально, в основном для питания сигнального процессора приемной аппаратуры (недостаток - значительая зависимость от помех). При активном способе передачи сигнала возрастает энергопотребление, но главное это то, что техническое средство демаскирует себя. Ожидается, что к 2030-2035 годам наземные роботы смогут осуществлять автоматическую маскировку с целью снижения своей заметности. В зависимости от условий местности, в частности рельефа и особенностей инфраструктуры, влияющей на распространение сигналов, роботизированное средство будет менять маршрут движения, характер излучаемых для связи или выполнения других задач сигналов в видимом, ИК- и миллиметровом диапазонах электромагнитного излучения. Возможно изменение способа передвижения, а также конфигурации аппарата для маскировки, повышения проходимости трудных участков, преодоления препятствий, более близкого приближения к возвышенностям, которые могут стать укрытием для робота. Дополнительно для маскировки и дезинформации будет предусмотрен режим случайного или хаотического движения аппарата наподобие прыжков зайца. Для надежной связи кроме характера сигнала важна структура протокола, то есть формат сообщений между устройствами. В настоящее время отсутствует единый стандарт протокола обмена информацией в виде сигналов даже в рамках одного государства. К 2020 году все робототехнические средства США будут осуществлять обмен со стандартным протоколом сообщений. К 2025-2030 годам предполагается создать экспериментальный вариант сети, в которой ДУМ будут взаимодействовать между собой независимо от стандарта протокола сообщений своей страны или фирмы-производителя. В ходе сеанса связи значительная по объему часть информации предназначена для описания объектов, которые обнаруживает аппаратура робота. В настоящее время при описании объекта используются в основном количественные параметры. К 2020 году при оценке объектов увеличится доля качественных параметров. Многоуровневая структура описания объектов позволит робототехническим средствам воспринимать, хранить и передавать информацию об окружающей обстановке подробно и без потери важных данных. Эта архитектура будет включать описательные, абстрактные, образные и векторные понятия, которые должны восприниматься и расшифровываться микропроцессорами систем управления робототехнических комплексов. Новые описательные возможности отличаются от существующих приблизительно так же, как буква кириллицы или латиницы, отображающая звук, от китайского иероглифа, обозначающего слово или даже выражение. Кроме повышения детализации описания обстановки и скорости обмена между роботами новая структура облегчит взаимопонимание между машинами и человеком. В условиях боевой обстановки скорость и надежность обмена данными имеют решающее значение.
Наряду с программными средствами для связи необходима приемопередающая аппаратура, дальность действия которой зависит от типа сигнала и условий ее функционирования. Для увеличения дальности связи используются ретрансляторы. Автоматизированная установка ретрансляторов предполагает, что робототехническое средство, прежде всего наземное, по мере ослабления сигнала от пункта управления будет выталкивать из своего грузового отсека или сбрасывать с платформы на грунт ретранслятор. Таким образом, во-первых, возможно с помощью роботов создать сеть ретрансляторов, обеспечивающих работу технических средств в едином информационном поле. Во-вторых, робототехнические средства позволят увеличить дальность устойчивой связи с оператором в условиях городской застройки, при работе в тоннелях, пещерах и т. п. К
2035 году запланировано создание высокоскоростной автоматизированной сети связи
для интеграции робототехнических комплексов в единое информационное поле.
Будущая сетевая структура отличается тем, что в ходе ее работы будут учитываться
данные об энергетическом состоянии потребителей или узлов связи и качественное
их состояние. То есть автоматически будет определяться маршрут передачи данных
при обнаружении неисправностей в сети, настраиваться мощность и тип передаваемых
сигналов. В нормальном рабочем состоянии сеть будет обеспечивать связь каждого
терминала с любым другим элементом сети. При этом предполагается использовать
разные формы протоколов и частоты в зависимости от условий обстановки. Главная проблема при распознавании - необходимо выделить человека среди движущихся безэкипажных или обычных машин. Внешне некоторые роботы могут быть похожи на человека, особенно передвигающего по-пластунски или стреляющего с колена. Важное значение для исключения ошибки или сигнала ложной тревоги имеет возможность выявления индивидуальных и коллективных средств маскировки. К 2020 году распознавание человека безэкипажным средством, вероятно, будет осуществляться в движении. Повышение возможностей реализуется благодаря новым научно-технических достижениям в области создания лазерной и микроволной техники. После 2030 года можно ожидать, что оснащение робототехнических средств биодатчиками позволит им практически без снижения скорости движения выделять, классифицировать человека и животное (например, служебную собаку), среди движущихся объектов, сравнимых с ними по размерам, тепловым параметрам и другим характеристикам. Для реализации данной возможности намечается создать датчики, выполняющие функции органов слуха, зрения и обоняния. Чувствительная аппаратура робота будет функционировать в большей степени как комбинированный биосенсор, а не как набор электронных компонентов. Человек является не только одним из объектов, который может обнаружить робот, но в большей степени тем, кто управляет этим техническим средством. В настоящее время для управления им, как правило, используется беспроводная связь. Управление по проводам чаще применяется для морских необитаемых аппаратов. Реже команды передаются голосом, при этом их набор ограничен. К 2020 году робот-помощник будет сопровождать военнослужащего подобно служебной собаке. Предполагается, что управление техническим средством будет осуществляться голосом и/или жестами. При этом в память аппаратуры должны быть заложены физиологические особенности человека, управляющего роботом, что необходимо для исключения несанкционированного влияния на работу этого средства другими людьми. После 2030 года ожидается повышение роли роботизированных устройств. Робот-руководитель будет посредником между военнослужащим-оператором и группой разного рода специализированных безэкипажных аппаратов. Получив задание от человека, робот-руководитель автоматически формирует и распределяет команды для управляемых им аналогичных технических средств. При этом на пульте управления оператора может отражаться информация, характеризующая деятельность робота-руководителя, а его команды могут быть скорректированы оператором. Кроме того, этот аппарат может функционировать автономно после получения задания от оператора. Робот-руководитель принимает сигналы от специализированных машин, обрабатывает их и передает на пульт управления оператора или же другим способом, например звуковым или световым сигналом, сообщает о своем решении.
Управляя несколькими роботами-руководителями, оператор или расчет командного ПУ
сможет распределять задачи большому числу робототехнических средств, которые
предположительно будут обмениваться информацией не только с управляющим роботом,
но и между собой. Таким образом, возможно создание сети роботов, контролируемой
одним оператором или расчетом. Повышенное внимание при развитии ДУМ уделяется проблеме исключения несанкционированного воздействия на наземный аппарат, то есть выведения его из рабочего состояния или управления им, противоречащего замыслам оператора. Снижение вероятности воздействия взрывоопасных предметов учитывается при разработке средств распознавания наземных аппаратов всех типов. Для специальных инженерных средств разминирования предусматривается усиленная защита.
Радиообмен на фиксированной частоте в ближайшие 10 лет останется одним из распространенных способов связи при дистанционном управлении безэкипажными наземными машинами. Основной его недостаток заключается в слабой защищенности от помех и радиоперехвата. Частота сигнала устанавливается центром управления формирования или командованием на театре военных действий. Планируется увеличение дальности действия радиообмена до 1 км в условиях городской застройки и скорости передачи данных до 3 Мбит/с. Обязательными требованиями являются: время задержки видеосигнала в режиме кодирования не должно превышать 200 мс; необходимо обеспечить закрытый режим обмена информацией. В настоящее время проводятся испытания опытных образцов, а принятие на вооружение средств связи, отвечающих перечисленным требованиям, ожидается к 2015 году. До 2020 года будет расширен диапазон используемых для связи частот. С этой целью проводятся научно-исследовательские работы, включающие моделирование отдельных подсистем. Предполагается, что для управления безэкипажными наземными машинами будут использоваться частоты инфракрасного и ультрафиолетового спектров диапазона. Сигналы данных диапазонов частот существенно меньше восприимчивы к интерференции и взаимному влиянию, что обеспечит при их использовании повышение надежности обмена информацией. Минимальные требования к времени задержки и скорости передачи данных аналогичны тем, что предъявляются к радиообмену на фиксированной частоте. Для обмена информацией между роботизированными аппаратами всех типов возможно использование настраиваемого режима связи. Этот режим предусматривает выбор типа сигнала и частоты в зависимости от условий обстановки для повышения эффективности обмена данными. Планируется, что роботы будут способны обмениваться не только радиоканалами, но и средствами цифровой связи с разными типами протоколов с помощью визуальных (вспышки, мигание, дым) и звуковых сигналов. Настраиваемый режим связи позволит повысить надежность, скрытность обмена информацией и процесс управления. С
целью развития приводов устройств и механизмов совершенствуются
электромеханические и гидравлические системы в направлении повышения запаса
прочности, а также увеличения времени наработки до отказа. К 2020 году возможно
создание искусственных механических устройств, обладающих гибкостью,
эластичностью и чувствительностью мышц человека, но с большей силой и прочностью
для элементов движителей и манипуляторов. К 2030 году можно ожидать, что гибридные биомеханические системы будут применяться в качестве приводов различного назначения, в том числе манипуляторов. Манипуляторы, не уступающие по своим возможностям человеку, планируется создать к 2015 году. Состоящие на вооружении инженерные безэкипажные наземные машины удовлетворяют требования по стойкости при падении и срабатывании взрывных устройств. При этом манипуляторы наземных машин не всегда справляются с поставленной задачей. Опыт боевых действий показал, что механические устройства должны обладать гибкостью и ловкостью, сравнимой с возможностями человека. В некоторых случаях создаваемые устройства по захвату и перемещению объектов хорошо выполняют свои функции, но их стоимость чрезвычайно высока. Цель исследований в данной области - создание относительно недорогих манипуляторов, способных не хуже, а в дальнейшем и лучше человека работать с опасными предметами. При этом по скорости работы манипулятор не должен существенно уступать человеку, а при дистанционном управлении механическое устройство обязано выполнять команды без заметной задержки. Манипуляторы со сверхчеловеческими возможностями могут быть созданы не ранее 2030-2035 годов. Предположительно, они будут изготавливаться из полимерных материалов высокой прочности. В настоящее время осуществляется моделирование отдельных элементов. При этом учитывается, что механизмы должны обладать одновременно жесткостью и упругостью. В частности, предусматривается создание гибких устройств, способных проникать в узкие каналы, имеющие несколько поворотов. Кроме гибкости и прочности данные манипуляторы должны обладать большой силой захвата объектов разного размера. Развитию наземных робототехнических комплексов военного назначения в США способствует долгосрочное планирование и высокая интенсивность проводимых в этой области работ. Уже в настоящее время на вооружении СВ и морской пехоты находятся несколько тысяч робототизированных комплексов различного назначения, имеющих разные массогабаритные характеристики. Основное назначение ДУМ - разведка и выполнение инженерных задач. Постепенно будет усиливаться роль безэкипажных машин с огневыми средствами на борту, а также предназначенных для обеспечения тыловых служб. По мере развития электронных приборов, сенсоров, элементов питания с повышенным запасом энергии, механических устройств диапазон применения робототехнических комплексов военного назначения будет расширяться. Снижение потерь среди военнослужащих - одна из основных целей применения таких средств на поле боя. Зарубежное военное обозрение 2013 №3 С.44-56 Смотрите также | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Просмотров: 13096 | | | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

| Всего комментариев: 0 | |